Introduction
On this publish we’ll describe the best way to use smartphone accelerometer and gyroscope knowledge to foretell the bodily actions of the people carrying the telephones. The information used on this publish comes from the Smartphone-Primarily based Recognition of Human Actions and Postural Transitions Information Set distributed by the College of California, Irvine. Thirty people have been tasked with performing numerous fundamental actions with an connected smartphone recording motion utilizing an accelerometer and gyroscope.
Earlier than we start, let’s load the varied libraries that we’ll use within the evaluation:
library(keras) # Neural Networks
library(tidyverse) # Information cleansing / Visualization
library(knitr) # Desk printing
library(rmarkdown) # Misc. output utilities
library(ggridges) # VisualizationActions dataset
The information used on this publish come from the Smartphone-Primarily based Recognition of Human Actions and Postural Transitions Information Set(Reyes-Ortiz et al. 2016) distributed by the College of California, Irvine.
When downloaded from the hyperlink above, the info comprises two completely different ‘components.’ One which has been pre-processed utilizing numerous function extraction strategies reminiscent of fast-fourier rework, and one other RawData part that merely provides the uncooked X,Y,Z instructions of an accelerometer and gyroscope. None of the usual noise filtering or function extraction utilized in accelerometer knowledge has been utilized. That is the info set we are going to use.
The motivation for working with the uncooked knowledge on this publish is to help the transition of the code/ideas to time sequence knowledge in much less well-characterized domains. Whereas a extra correct mannequin might be made by using the filtered/cleaned knowledge supplied, the filtering and transformation can fluctuate significantly from activity to activity; requiring a lot of handbook effort and area data. One of many stunning issues about deep studying is the function extraction is discovered from the info, not outdoors data.
Exercise labels
The information has integer encodings for the actions which, whereas not vital to the mannequin itself, are useful to be used to see. Let’s load them first.
activityLabels <- learn.desk("knowledge/activity_labels.txt",
col.names = c("quantity", "label"))
activityLabels %>% kable(align = c("c", "l"))| 1 | WALKING |
| 2 | WALKING_UPSTAIRS |
| 3 | WALKING_DOWNSTAIRS |
| 4 | SITTING |
| 5 | STANDING |
| 6 | LAYING |
| 7 | STAND_TO_SIT |
| 8 | SIT_TO_STAND |
| 9 | SIT_TO_LIE |
| 10 | LIE_TO_SIT |
| 11 | STAND_TO_LIE |
| 12 | LIE_TO_STAND |
Subsequent, we load within the labels key for the RawData. This file is an inventory of all the observations, or particular person exercise recordings, contained within the knowledge set. The important thing for the columns is taken from the info README.txt.
Column 1: experiment quantity ID,
Column 2: consumer quantity ID,
Column 3: exercise quantity ID
Column 4: Label begin level
Column 5: Label finish level The beginning and finish factors are in variety of sign log samples (recorded at 50hz).
Let’s check out the primary 50 rows:
labels <- learn.desk(
"knowledge/RawData/labels.txt",
col.names = c("experiment", "userId", "exercise", "startPos", "endPos")
)
labels %>%
head(50) %>%
paged_table()File names
Subsequent, let’s take a look at the precise recordsdata of the consumer knowledge supplied to us in RawData/
dataFiles <- listing.recordsdata("knowledge/RawData")
dataFiles %>% head()
[1] "acc_exp01_user01.txt" "acc_exp02_user01.txt"
[3] "acc_exp03_user02.txt" "acc_exp04_user02.txt"
[5] "acc_exp05_user03.txt" "acc_exp06_user03.txt"There’s a three-part file naming scheme. The primary half is the kind of knowledge the file comprises: both acc for accelerometer or gyro for gyroscope. Subsequent is the experiment quantity, and final is the consumer Id for the recording. Let’s load these right into a dataframe for ease of use later.
fileInfo <- data_frame(
filePath = dataFiles
) %>%
filter(filePath != "labels.txt") %>%
separate(filePath, sep = '_',
into = c("kind", "experiment", "userId"),
take away = FALSE) %>%
mutate(
experiment = str_remove(experiment, "exp"),
userId = str_remove_all(userId, "consumer|.txt")
) %>%
unfold(kind, filePath)
fileInfo %>% head() %>% kable()| 01 | 01 | acc_exp01_user01.txt | gyro_exp01_user01.txt |
| 02 | 01 | acc_exp02_user01.txt | gyro_exp02_user01.txt |
| 03 | 02 | acc_exp03_user02.txt | gyro_exp03_user02.txt |
| 04 | 02 | acc_exp04_user02.txt | gyro_exp04_user02.txt |
| 05 | 03 | acc_exp05_user03.txt | gyro_exp05_user03.txt |
| 06 | 03 | acc_exp06_user03.txt | gyro_exp06_user03.txt |
Studying and gathering knowledge
Earlier than we will do something with the info supplied we have to get it right into a model-friendly format. This implies we need to have an inventory of observations, their class (or exercise label), and the info equivalent to the recording.
To acquire this we are going to scan by every of the recording recordsdata current in dataFiles, lookup what observations are contained within the recording, extract these recordings and return the whole lot to a simple to mannequin with dataframe.
# Learn contents of single file to a dataframe with accelerometer and gyro knowledge.
readInData <- perform(experiment, userId){
genFilePath = perform(kind) {
paste0("knowledge/RawData/", kind, "_exp",experiment, "_user", userId, ".txt")
}
bind_cols(
learn.desk(genFilePath("acc"), col.names = c("a_x", "a_y", "a_z")),
learn.desk(genFilePath("gyro"), col.names = c("g_x", "g_y", "g_z"))
)
}
# Perform to learn a given file and get the observations contained alongside
# with their courses.
loadFileData <- perform(curExperiment, curUserId) {
# load sensor knowledge from file into dataframe
allData <- readInData(curExperiment, curUserId)
extractObservation <- perform(startPos, endPos){
allData[startPos:endPos,]
}
# get commentary places on this file from labels dataframe
dataLabels <- labels %>%
filter(userId == as.integer(curUserId),
experiment == as.integer(curExperiment))
# extract observations as dataframes and save as a column in dataframe.
dataLabels %>%
mutate(
knowledge = map2(startPos, endPos, extractObservation)
) %>%
choose(-startPos, -endPos)
}
# scan by all experiment and userId combos and collect knowledge right into a dataframe.
allObservations <- map2_df(fileInfo$experiment, fileInfo$userId, loadFileData) %>%
right_join(activityLabels, by = c("exercise" = "quantity")) %>%
rename(activityName = label)
# cache work.
write_rds(allObservations, "allObservations.rds")
allObservations %>% dim()Exploring the info
Now that we’ve all the info loaded together with the experiment, userId, and exercise labels, we will discover the info set.
Size of recordings
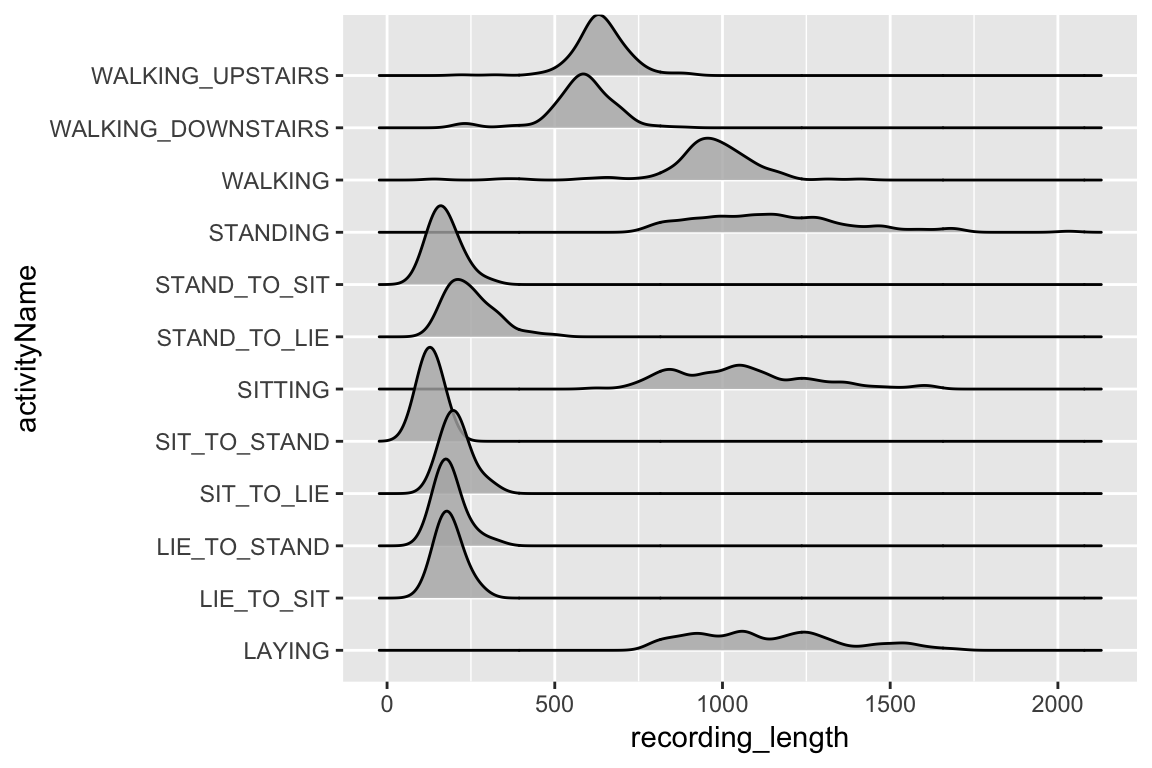
Let’s first take a look at the size of the recordings by exercise.
allObservations %>%
mutate(recording_length = map_int(knowledge,nrow)) %>%
ggplot(aes(x = recording_length, y = activityName)) +
geom_density_ridges(alpha = 0.8)
The actual fact there’s such a distinction in size of recording between the completely different exercise varieties requires us to be a bit cautious with how we proceed. If we practice the mannequin on each class directly we’re going to must pad all of the observations to the size of the longest, which would go away a big majority of the observations with an enormous proportion of their knowledge being simply padding-zeros. Due to this, we are going to match our mannequin to only the biggest ‘group’ of observations size actions, these embody STAND_TO_SIT, STAND_TO_LIE, SIT_TO_STAND, SIT_TO_LIE, LIE_TO_STAND, and LIE_TO_SIT.
An fascinating future course could be trying to make use of one other structure reminiscent of an RNN that may deal with variable size inputs and coaching it on all the info. Nonetheless, you’ll run the danger of the mannequin studying merely that if the commentary is lengthy it’s most definitely one of many 4 longest courses which might not generalize to a situation the place you have been working this mannequin on a real-time-stream of information.
Filtering actions
Primarily based on our work from above, let’s subset the info to only be of the actions of curiosity.
desiredActivities <- c(
"STAND_TO_SIT", "SIT_TO_STAND", "SIT_TO_LIE",
"LIE_TO_SIT", "STAND_TO_LIE", "LIE_TO_STAND"
)
filteredObservations <- allObservations %>%
filter(activityName %in% desiredActivities) %>%
mutate(observationId = 1:n())
filteredObservations %>% paged_table()So after our aggressive pruning of the info we may have a decent quantity of information left upon which our mannequin can be taught.
Coaching/testing cut up
Earlier than we go any additional into exploring the info for our mannequin, in an try to be as honest as potential with our efficiency measures, we have to cut up the info right into a practice and check set. Since every consumer carried out all actions simply as soon as (apart from one who solely did 10 of the 12 actions) by splitting on userId we are going to make sure that our mannequin sees new individuals completely after we check it.
# get all customers
userIds <- allObservations$userId %>% distinctive()
# randomly select 24 (80% of 30 people) for coaching
set.seed(42) # seed for reproducibility
trainIds <- pattern(userIds, dimension = 24)
# set the remainder of the customers to the testing set
testIds <- setdiff(userIds,trainIds)
# filter knowledge.
trainData <- filteredObservations %>%
filter(userId %in% trainIds)
testData <- filteredObservations %>%
filter(userId %in% testIds)Visualizing actions
Now that we’ve trimmed our knowledge by eradicating actions and splitting off a check set, we will really visualize the info for every class to see if there’s any instantly discernible form that our mannequin could possibly decide up on.
First let’s unpack our knowledge from its dataframe of one-row-per-observation to a tidy model of all of the observations.
unpackedObs <- 1:nrow(trainData) %>%
map_df(perform(rowNum){
dataRow <- trainData[rowNum, ]
dataRow$knowledge[[1]] %>%
mutate(
activityName = dataRow$activityName,
observationId = dataRow$observationId,
time = 1:n() )
}) %>%
collect(studying, worth, -time, -activityName, -observationId) %>%
separate(studying, into = c("kind", "course"), sep = "_") %>%
mutate(kind = ifelse(kind == "a", "acceleration", "gyro"))Now we’ve an unpacked set of our observations, let’s visualize them!
unpackedObs %>%
ggplot(aes(x = time, y = worth, colour = course)) +
geom_line(alpha = 0.2) +
geom_smooth(se = FALSE, alpha = 0.7, dimension = 0.5) +
facet_grid(kind ~ activityName, scales = "free_y") +
theme_minimal() +
theme( axis.textual content.x = element_blank() )
So no less than within the accelerometer knowledge patterns undoubtedly emerge. One would think about that the mannequin could have bother with the variations between LIE_TO_SIT and LIE_TO_STAND as they’ve the same profile on common. The identical goes for SIT_TO_STAND and STAND_TO_SIT.
Preprocessing
Earlier than we will practice the neural community, we have to take a few steps to preprocess the info.
Padding observations
First we are going to determine what size to pad (and truncate) our sequences to by discovering what the 98th percentile size is. By not utilizing the very longest commentary size this may assist us keep away from extra-long outlier recordings messing up the padding.
padSize <- trainData$knowledge %>%
map_int(nrow) %>%
quantile(p = 0.98) %>%
ceiling()
padSize
98%
334 Now we merely have to convert our listing of observations to matrices, then use the tremendous useful pad_sequences() perform in Keras to pad all observations and switch them right into a 3D tensor for us.
convertToTensor <- . %>%
map(as.matrix) %>%
pad_sequences(maxlen = padSize)
trainObs <- trainData$knowledge %>% convertToTensor()
testObs <- testData$knowledge %>% convertToTensor()
dim(trainObs)
[1] 286 334 6Great, we now have our knowledge in a pleasant neural-network-friendly format of a 3D tensor with dimensions (<num obs>, <sequence size>, <channels>).
One-hot encoding
There’s one last item we have to do earlier than we will practice our mannequin, and that’s flip our commentary courses from integers into one-hot, or dummy encoded, vectors. Fortunately, once more Keras has provided us with a really useful perform to just do this.
oneHotClasses <- . %>%
{. - 7} %>% # deliver integers all the way down to 0-6 from 7-12
to_categorical() # One-hot encode
trainY <- trainData$exercise %>% oneHotClasses()
testY <- testData$exercise %>% oneHotClasses()Modeling
Structure
Since we’ve temporally dense time-series knowledge we are going to make use of 1D convolutional layers. With temporally-dense knowledge, an RNN has to be taught very lengthy dependencies with the intention to decide up on patterns, CNNs can merely stack a couple of convolutional layers to construct sample representations of considerable size. Since we’re additionally merely searching for a single classification of exercise for every commentary, we will simply use pooling to ‘summarize’ the CNNs view of the info right into a dense layer.
Along with stacking two layer_conv_1d() layers, we are going to use batch norm and dropout (the spatial variant(Tompson et al. 2014) on the convolutional layers and customary on the dense) to regularize the community.
input_shape <- dim(trainObs)[-1]
num_classes <- dim(trainY)[2]
filters <- 24 # variety of convolutional filters to be taught
kernel_size <- 8 # what number of time-steps every conv layer sees.
dense_size <- 48 # dimension of our penultimate dense layer.
# Initialize mannequin
mannequin <- keras_model_sequential()
mannequin %>%
layer_conv_1d(
filters = filters,
kernel_size = kernel_size,
input_shape = input_shape,
padding = "legitimate",
activation = "relu"
) %>%
layer_batch_normalization() %>%
layer_spatial_dropout_1d(0.15) %>%
layer_conv_1d(
filters = filters/2,
kernel_size = kernel_size,
activation = "relu",
) %>%
# Apply common pooling:
layer_global_average_pooling_1d() %>%
layer_batch_normalization() %>%
layer_dropout(0.2) %>%
layer_dense(
dense_size,
activation = "relu"
) %>%
layer_batch_normalization() %>%
layer_dropout(0.25) %>%
layer_dense(
num_classes,
activation = "softmax",
title = "dense_output"
)
abstract(mannequin)
______________________________________________________________________
Layer (kind) Output Form Param #
======================================================================
conv1d_1 (Conv1D) (None, 327, 24) 1176
______________________________________________________________________
batch_normalization_1 (BatchNo (None, 327, 24) 96
______________________________________________________________________
spatial_dropout1d_1 (SpatialDr (None, 327, 24) 0
______________________________________________________________________
conv1d_2 (Conv1D) (None, 320, 12) 2316
______________________________________________________________________
global_average_pooling1d_1 (Gl (None, 12) 0
______________________________________________________________________
batch_normalization_2 (BatchNo (None, 12) 48
______________________________________________________________________
dropout_1 (Dropout) (None, 12) 0
______________________________________________________________________
dense_1 (Dense) (None, 48) 624
______________________________________________________________________
batch_normalization_3 (BatchNo (None, 48) 192
______________________________________________________________________
dropout_2 (Dropout) (None, 48) 0
______________________________________________________________________
dense_output (Dense) (None, 6) 294
======================================================================
Whole params: 4,746
Trainable params: 4,578
Non-trainable params: 168
______________________________________________________________________Coaching
Now we will practice the mannequin utilizing our check and coaching knowledge. Observe that we use callback_model_checkpoint() to make sure that we save solely one of the best variation of the mannequin (fascinating since sooner or later in coaching the mannequin could start to overfit or in any other case cease enhancing).
# Compile mannequin
mannequin %>% compile(
loss = "categorical_crossentropy",
optimizer = "rmsprop",
metrics = "accuracy"
)
trainHistory <- mannequin %>%
match(
x = trainObs, y = trainY,
epochs = 350,
validation_data = listing(testObs, testY),
callbacks = listing(
callback_model_checkpoint("best_model.h5",
save_best_only = TRUE)
)
)
The mannequin is studying one thing! We get a decent 94.4% accuracy on the validation knowledge, not unhealthy with six potential courses to select from. Let’s look into the validation efficiency a little bit deeper to see the place the mannequin is messing up.
Analysis
Now that we’ve a educated mannequin let’s examine the errors that it made on our testing knowledge. We are able to load one of the best mannequin from coaching primarily based upon validation accuracy after which take a look at every commentary, what the mannequin predicted, how excessive a likelihood it assigned, and the true exercise label.
# dataframe to get labels onto one-hot encoded prediction columns
oneHotToLabel <- activityLabels %>%
mutate(quantity = quantity - 7) %>%
filter(quantity >= 0) %>%
mutate(class = paste0("V",quantity + 1)) %>%
choose(-number)
# Load our greatest mannequin checkpoint
bestModel <- load_model_hdf5("best_model.h5")
tidyPredictionProbs <- bestModel %>%
predict(testObs) %>%
as_data_frame() %>%
mutate(obs = 1:n()) %>%
collect(class, prob, -obs) %>%
right_join(oneHotToLabel, by = "class")
predictionPerformance <- tidyPredictionProbs %>%
group_by(obs) %>%
summarise(
highestProb = max(prob),
predicted = label[prob == highestProb]
) %>%
mutate(
fact = testData$activityName,
appropriate = fact == predicted
)
predictionPerformance %>% paged_table()First, let’s take a look at how ‘assured’ the mannequin was by if the prediction was appropriate or not.
predictionPerformance %>%
mutate(consequence = ifelse(appropriate, 'Right', 'Incorrect')) %>%
ggplot(aes(highestProb)) +
geom_histogram(binwidth = 0.01) +
geom_rug(alpha = 0.5) +
facet_grid(consequence~.) +
ggtitle("Chances related to prediction by correctness")
Reassuringly it appears the mannequin was, on common, much less assured about its classifications for the inaccurate outcomes than the right ones. (Though, the pattern dimension is simply too small to say something definitively.)
Let’s see what actions the mannequin had the toughest time with utilizing a confusion matrix.
predictionPerformance %>%
group_by(fact, predicted) %>%
summarise(rely = n()) %>%
mutate(good = fact == predicted) %>%
ggplot(aes(x = fact, y = predicted)) +
geom_point(aes(dimension = rely, colour = good)) +
geom_text(aes(label = rely),
hjust = 0, vjust = 0,
nudge_x = 0.1, nudge_y = 0.1) +
guides(colour = FALSE, dimension = FALSE) +
theme_minimal()
We see that, because the preliminary visualization steered, the mannequin had a little bit of bother with distinguishing between LIE_TO_SIT and LIE_TO_STAND courses, together with the SIT_TO_LIE and STAND_TO_LIE, which even have comparable visible profiles.
Future instructions
The obvious future course to take this evaluation could be to aim to make the mannequin extra common by working with extra of the provided exercise varieties. One other fascinating course could be to not separate the recordings into distinct ‘observations’ however as a substitute hold them as one streaming set of information, very similar to an actual world deployment of a mannequin would work, and see how nicely a mannequin might classify streaming knowledge and detect modifications in exercise.
Gal, Yarin, and Zoubin Ghahramani. 2016. “Dropout as a Bayesian Approximation: Representing Mannequin Uncertainty in Deep Studying.” In Worldwide Convention on Machine Studying, 1050–9.
Graves, Alex. 2012. “Supervised Sequence Labelling.” In Supervised Sequence Labelling with Recurrent Neural Networks, 5–13. Springer.
Kononenko, Igor. 1989. “Bayesian Neural Networks.” Organic Cybernetics 61 (5). Springer: 361–70.
LeCun, Yann, Yoshua Bengio, and Geoffrey Hinton. 2015. “Deep Studying.” Nature 521 (7553). Nature Publishing Group: 436.
Reyes-Ortiz, Jorge-L, Luca Oneto, Albert Samà, Xavier Parra, and Davide Anguita. 2016. “Transition-Conscious Human Exercise Recognition Utilizing Smartphones.” Neurocomputing 171. Elsevier: 754–67.
Tompson, Jonathan, Ross Goroshin, Arjun Jain, Yann LeCun, and Christoph Bregler. 2014. “Environment friendly Object Localization Utilizing Convolutional Networks.” CoRR abs/1411.4280. http://arxiv.org/abs/1411.4280.