Welcome to the world of state house fashions. On this world, there’s a latent course of, hidden from our eyes; and there are observations we make in regards to the issues it produces. The method evolves as a consequence of some hidden logic (transition mannequin); and the best way it produces the observations follows some hidden logic (remark mannequin). There may be noise in course of evolution, and there’s noise in remark. If the transition and remark fashions each are linear, and the method in addition to remark noise are Gaussian, we now have a linear-Gaussian state house mannequin (SSM). The duty is to deduce the latent state from the observations. Probably the most well-known approach is the Kálmán filter.
In sensible purposes, two traits of linear-Gaussian SSMs are particularly engaging.
For one, they allow us to estimate dynamically altering parameters. In regression, the parameters will be seen as a hidden state; we could thus have a slope and an intercept that fluctuate over time. When parameters can range, we converse of dynamic linear fashions (DLMs). That is the time period we’ll use all through this submit when referring to this class of fashions.
Second, linear-Gaussian SSMs are helpful in time-series forecasting as a result of Gaussian processes will be added. A time collection can thus be framed as, e.g. the sum of a linear pattern and a course of that varies seasonally.
Utilizing tfprobability, the R wrapper to TensorFlow Likelihood, we illustrate each points right here. Our first instance will probably be on dynamic linear regression. In an in depth walkthrough, we present on tips on how to match such a mannequin, tips on how to acquire filtered, in addition to smoothed, estimates of the coefficients, and tips on how to acquire forecasts.
Our second instance then illustrates course of additivity. This instance will construct on the primary, and might also function a fast recap of the general process.
Let’s leap in.
Dynamic linear regression instance: Capital Asset Pricing Mannequin (CAPM)
Our code builds on the lately launched variations of TensorFlow and TensorFlow Likelihood: 1.14 and 0.7, respectively.
Word how there’s one factor we used to do recently that we’re not doing right here: We’re not enabling keen execution. We are saying why in a minute.
Our instance is taken from Petris et al.(2009)(Petris, Petrone, and Campagnoli 2009), chapter 3.2.7.
In addition to introducing the dlm bundle, this ebook offers a pleasant introduction to the concepts behind DLMs basically.
For example dynamic linear regression, the authors characteristic a dataset, initially from Berndt(1991)(Berndt 1991) that has month-to-month returns, collected from January 1978 to December 1987, for 4 completely different shares, the 30-day Treasury Invoice – standing in for a risk-free asset –, and the value-weighted common returns for all shares listed on the New York and American Inventory Exchanges, representing the general market returns.
Let’s have a look.
# As the information doesn't appear to be accessible on the tackle given in Petris et al. any extra,
# we put it on the weblog for obtain
# obtain from:
# https://github.com/rstudio/tensorflow-blog/blob/grasp/docs/posts/2019-06-25-dynamic_linear_models_tfprobability/knowledge/capm.txt"
df <- read_table(
"capm.txt",
col_types = checklist(X1 = col_date(format = "%Y.%m"))) %>%
rename(month = X1)
df %>% glimpse()Observations: 120
Variables: 7
$ month <date> 1978-01-01, 1978-02-01, 1978-03-01, 1978-04-01, 1978-05-01, 19…
$ MOBIL <dbl> -0.046, -0.017, 0.049, 0.077, -0.011, -0.043, 0.028, 0.056, 0.0…
$ IBM <dbl> -0.029, -0.043, -0.063, 0.130, -0.018, -0.004, 0.092, 0.049, -0…
$ WEYER <dbl> -0.116, -0.135, 0.084, 0.144, -0.031, 0.005, 0.164, 0.039, -0.0…
$ CITCRP <dbl> -0.115, -0.019, 0.059, 0.127, 0.005, 0.007, 0.032, 0.088, 0.011…
$ MARKET <dbl> -0.045, 0.010, 0.050, 0.063, 0.067, 0.007, 0.071, 0.079, 0.002,…
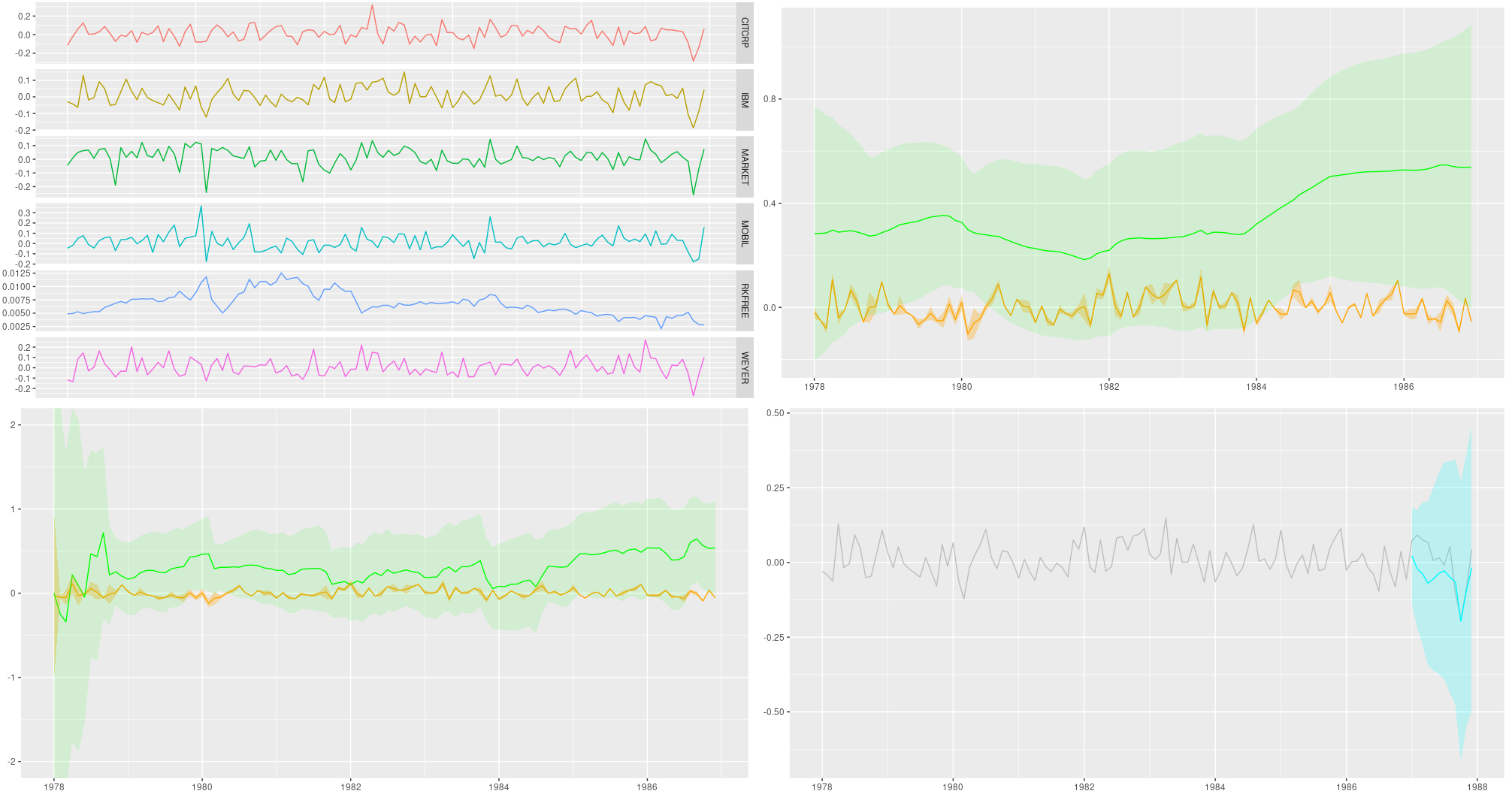
$ RKFREE <dbl> 0.00487, 0.00494, 0.00526, 0.00491, 0.00513, 0.00527, 0.00528, …df %>% collect(key = "image", worth = "return", -month) %>%
ggplot(aes(x = month, y = return, shade = image)) +
geom_line() +
facet_grid(rows = vars(image), scales = "free")
Determine 1: Month-to-month returns for chosen shares; knowledge from Berndt (1991).
The Capital Asset Pricing Mannequin then assumes a linear relationship between the surplus returns of an asset beneath examine and the surplus returns of the market. For each, extra returns are obtained by subtracting the returns of the chosen risk-free asset; then, the scaling coefficient between them reveals the asset to both be an “aggressive” funding (slope > 1: modifications out there are amplified), or a conservative one (slope < 1: modifications are damped).
Assuming this relationship doesn’t change over time, we will simply use lm as an example this. Following Petris et al. in zooming in on IBM because the asset beneath examine, we now have
Name:
lm(method = ibm ~ x)
Residuals:
Min 1Q Median 3Q Max
-0.11850 -0.03327 -0.00263 0.03332 0.15042
Coefficients:
Estimate Std. Error t worth Pr(>|t|)
(Intercept) -0.0004896 0.0046400 -0.106 0.916
x 0.4568208 0.0675477 6.763 5.49e-10 ***
---
Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual normal error: 0.05055 on 118 levels of freedom
A number of R-squared: 0.2793, Adjusted R-squared: 0.2732
F-statistic: 45.74 on 1 and 118 DF, p-value: 5.489e-10So IBM is discovered to be a conservative funding, the slope being ~ 0.5. However is that this relationship secure over time?
Let’s flip to tfprobability to analyze.
We need to use this instance to exhibit two important purposes of DLMs: acquiring smoothing and/or filtering estimates of the coefficients, in addition to forecasting future values. So not like Petris et al., we divide the dataset right into a coaching and a testing half:.
We now assemble the mannequin. sts_dynamic_linear_regression() does what we would like:
We cross it the column of extra market returns, plus a column of ones, following Petris et al.. Alternatively, we may middle the one predictor – this is able to work simply as nicely.
How are we going to coach this mannequin? Technique-wise, we now have a selection between variational inference (VI) and Hamiltonian Monte Carlo (HMC). We’ll see each. The second query is: Are we going to make use of graph mode or keen mode? As of at this time, for each VI and HMC, it’s most secure – and quickest – to run in graph mode, so that is the one approach we present. In just a few weeks, or months, we must always be capable of prune plenty of sess$run()s from the code!
Usually in posts, when presenting code we optimize for simple experimentation (which means: line-by-line executability), not modularity. This time although, with an vital variety of analysis statements concerned, it’s best to pack not simply the becoming, however the smoothing and forecasting as nicely right into a perform (which you could possibly nonetheless step by in the event you needed). For VI, we’ll have a match _with_vi perform that does all of it. So after we now begin explaining what it does, don’t sort within the code simply but – it’ll all reappear properly packed into that perform, so that you can copy and execute as a complete.
Becoming a time collection with variational inference
Becoming with VI just about appears to be like like coaching historically used to look in graph-mode TensorFlow. You outline a loss – right here it’s achieved utilizing sts_build_factored_variational_loss() –, an optimizer, and an operation for the optimizer to cut back that loss:
optimizer <- tf$compat$v1$prepare$AdamOptimizer(0.1)
# solely prepare on the coaching set!
loss_and_dists <- ts_train %>% sts_build_factored_variational_loss(mannequin = mannequin)
variational_loss <- loss_and_dists[[1]]
train_op <- optimizer$reduce(variational_loss)Word how the loss is outlined on the coaching set solely, not the whole collection.
Now to truly prepare the mannequin, we create a session and run that operation:
with (tf$Session() %as% sess, {
sess$run(tf$compat$v1$global_variables_initializer())
for (step in 1:n_iterations) {
res <- sess$run(train_op)
loss <- sess$run(variational_loss)
if (step %% 10 == 0)
cat("Loss: ", as.numeric(loss), "n")
}
})Given we now have that session, let’s make use of it and compute all of the estimates we need.
Once more, – the next snippets will find yourself within the fit_with_vi perform, so don’t run them in isolation simply but.
Acquiring forecasts
The very first thing we would like for the mannequin to present us are forecasts. With a purpose to create them, it wants samples from the posterior. Fortunately we have already got the posterior distributions, returned from sts_build_factored_variational_loss, so let’s pattern from them and cross them to sts_forecast:
sts_forecast() returns distributions, so we name tfd_mean() to get the posterior predictions and tfd_stddev() for the corresponding normal deviations:
fc_means <- forecast_dists %>% tfd_mean()
fc_sds <- forecast_dists %>% tfd_stddev()By the best way – as we now have the complete posterior distributions, we’re on no account restricted to abstract statistics! We may simply use tfd_sample() to acquire particular person forecasts.
Smoothing and filtering (Kálmán filter)
Now, the second (and final, for this instance) factor we’ll need are the smoothed and filtered regression coefficients. The well-known Kálmán Filter is a Bayesian-in-spirit methodology the place at every time step, predictions are corrected by how a lot they differ from an incoming remark. Filtering estimates are based mostly on observations we’ve seen to date; smoothing estimates are computed “in hindsight,” making use of the whole time collection.
We first create a state house mannequin from our time collection definition:
# solely do that on the coaching set
# returns an occasion of tfd_linear_gaussian_state_space_model()
ssm <- mannequin$make_state_space_model(size(ts_train), param_vals = posterior_samples)tfd_linear_gaussian_state_space_model(), technically a distribution, offers the Kálmán filter functionalities of smoothing and filtering.
To acquire the smoothed estimates:
c(smoothed_means, smoothed_covs) %<-% ssm$posterior_marginals(ts_train)And the filtered ones:
c(., filtered_means, filtered_covs, ., ., ., .) %<-% ssm$forward_filter(ts_train)Lastly, we have to consider all these.
Placing all of it collectively (the VI version)
So right here’s the whole perform, fit_with_vi, prepared for us to name.
fit_with_vi <-
perform(ts,
ts_train,
mannequin,
n_iterations,
n_param_samples,
n_forecast_steps,
n_forecast_samples) {
optimizer <- tf$compat$v1$prepare$AdamOptimizer(0.1)
loss_and_dists <-
ts_train %>% sts_build_factored_variational_loss(mannequin = mannequin)
variational_loss <- loss_and_dists[[1]]
train_op <- optimizer$reduce(variational_loss)
with (tf$Session() %as% sess, {
sess$run(tf$compat$v1$global_variables_initializer())
for (step in 1:n_iterations) {
sess$run(train_op)
loss <- sess$run(variational_loss)
if (step %% 1 == 0)
cat("Loss: ", as.numeric(loss), "n")
}
variational_distributions <- loss_and_dists[[2]]
posterior_samples <-
Map(
perform(d)
d %>% tfd_sample(n_param_samples),
variational_distributions %>% reticulate::py_to_r() %>% unname()
)
forecast_dists <-
ts_train %>% sts_forecast(mannequin, posterior_samples, n_forecast_steps)
fc_means <- forecast_dists %>% tfd_mean()
fc_sds <- forecast_dists %>% tfd_stddev()
ssm <- mannequin$make_state_space_model(size(ts_train), param_vals = posterior_samples)
c(smoothed_means, smoothed_covs) %<-% ssm$posterior_marginals(ts_train)
c(., filtered_means, filtered_covs, ., ., ., .) %<-% ssm$forward_filter(ts_train)
c(posterior_samples, fc_means, fc_sds, smoothed_means, smoothed_covs, filtered_means, filtered_covs) %<-%
sess$run(checklist(posterior_samples, fc_means, fc_sds, smoothed_means, smoothed_covs, filtered_means, filtered_covs))
})
checklist(
variational_distributions,
posterior_samples,
fc_means[, 1],
fc_sds[, 1],
smoothed_means,
smoothed_covs,
filtered_means,
filtered_covs
)
}And that is how we name it.
# variety of VI steps
n_iterations <- 300
# pattern dimension for posterior samples
n_param_samples <- 50
# pattern dimension to attract from the forecast distribution
n_forecast_samples <- 50
# here is the mannequin once more
mannequin <- ts %>%
sts_dynamic_linear_regression(design_matrix = cbind(rep(1, size(x)), x) %>% tf$forged(tf$float32))
# name fit_vi outlined above
c(
param_distributions,
param_samples,
fc_means,
fc_sds,
smoothed_means,
smoothed_covs,
filtered_means,
filtered_covs
) %<-% fit_vi(
ts,
ts_train,
mannequin,
n_iterations,
n_param_samples,
n_forecast_steps,
n_forecast_samples
)Curious in regards to the outcomes? We’ll see them in a second, however earlier than let’s simply shortly look on the different coaching methodology: HMC.
Placing all of it collectively (the HMC version)
tfprobability offers sts_fit_with_hmc to suit a DLM utilizing Hamiltonian Monte Carlo. Latest posts (e.g., Hierarchical partial pooling, continued: Various slopes fashions with TensorFlow Likelihood) confirmed tips on how to arrange HMC to suit hierarchical fashions; right here a single perform does all of it.
Right here is fit_with_hmc, wrapping sts_fit_with_hmc in addition to the (unchanged) strategies for acquiring forecasts and smoothed/filtered parameters:
num_results <- 200
num_warmup_steps <- 100
fit_hmc <- perform(ts,
ts_train,
mannequin,
num_results,
num_warmup_steps,
n_forecast,
n_forecast_samples) {
states_and_results <-
ts_train %>% sts_fit_with_hmc(
mannequin,
num_results = num_results,
num_warmup_steps = num_warmup_steps,
num_variational_steps = num_results + num_warmup_steps
)
posterior_samples <- states_and_results[[1]]
forecast_dists <-
ts_train %>% sts_forecast(mannequin, posterior_samples, n_forecast_steps)
fc_means <- forecast_dists %>% tfd_mean()
fc_sds <- forecast_dists %>% tfd_stddev()
ssm <-
mannequin$make_state_space_model(size(ts_train), param_vals = posterior_samples)
c(smoothed_means, smoothed_covs) %<-% ssm$posterior_marginals(ts_train)
c(., filtered_means, filtered_covs, ., ., ., .) %<-% ssm$forward_filter(ts_train)
with (tf$Session() %as% sess, {
sess$run(tf$compat$v1$global_variables_initializer())
c(
posterior_samples,
fc_means,
fc_sds,
smoothed_means,
smoothed_covs,
filtered_means,
filtered_covs
) %<-%
sess$run(
checklist(
posterior_samples,
fc_means,
fc_sds,
smoothed_means,
smoothed_covs,
filtered_means,
filtered_covs
)
)
})
checklist(
posterior_samples,
fc_means[, 1],
fc_sds[, 1],
smoothed_means,
smoothed_covs,
filtered_means,
filtered_covs
)
}
c(
param_samples,
fc_means,
fc_sds,
smoothed_means,
smoothed_covs,
filtered_means,
filtered_covs
) %<-% fit_hmc(ts,
ts_train,
mannequin,
num_results,
num_warmup_steps,
n_forecast,
n_forecast_samples)Now lastly, let’s check out the forecasts and filtering resp. smoothing estimates.
Forecasts
Placing all we want into one dataframe, we now have
smoothed_means_intercept <- smoothed_means[, , 1] %>% colMeans()
smoothed_means_slope <- smoothed_means[, , 2] %>% colMeans()
smoothed_sds_intercept <- smoothed_covs[, , 1, 1] %>% colMeans() %>% sqrt()
smoothed_sds_slope <- smoothed_covs[, , 2, 2] %>% colMeans() %>% sqrt()
filtered_means_intercept <- filtered_means[, , 1] %>% colMeans()
filtered_means_slope <- filtered_means[, , 2] %>% colMeans()
filtered_sds_intercept <- filtered_covs[, , 1, 1] %>% colMeans() %>% sqrt()
filtered_sds_slope <- filtered_covs[, , 2, 2] %>% colMeans() %>% sqrt()
forecast_df <- df %>%
choose(month, IBM) %>%
add_column(pred_mean = c(rep(NA, size(ts_train)), fc_means)) %>%
add_column(pred_sd = c(rep(NA, size(ts_train)), fc_sds)) %>%
add_column(smoothed_means_intercept = c(smoothed_means_intercept, rep(NA, n_forecast_steps))) %>%
add_column(smoothed_means_slope = c(smoothed_means_slope, rep(NA, n_forecast_steps))) %>%
add_column(smoothed_sds_intercept = c(smoothed_sds_intercept, rep(NA, n_forecast_steps))) %>%
add_column(smoothed_sds_slope = c(smoothed_sds_slope, rep(NA, n_forecast_steps))) %>%
add_column(filtered_means_intercept = c(filtered_means_intercept, rep(NA, n_forecast_steps))) %>%
add_column(filtered_means_slope = c(filtered_means_slope, rep(NA, n_forecast_steps))) %>%
add_column(filtered_sds_intercept = c(filtered_sds_intercept, rep(NA, n_forecast_steps))) %>%
add_column(filtered_sds_slope = c(filtered_sds_slope, rep(NA, n_forecast_steps)))So right here first are the forecasts. We’re utilizing the estimates returned from VI, however we may simply as nicely have used these from HMC – they’re almost indistinguishable. The identical goes for the filtering and smoothing estimates displayed beneath.
ggplot(forecast_df, aes(x = month, y = IBM)) +
geom_line(shade = "gray") +
geom_line(aes(y = pred_mean), shade = "cyan") +
geom_ribbon(
aes(ymin = pred_mean - 2 * pred_sd, ymax = pred_mean + 2 * pred_sd),
alpha = 0.2,
fill = "cyan"
) +
theme(axis.title = element_blank())
Determine 2: 12-point-ahead forecasts for IBM; posterior means +/- 2 normal deviations.
Smoothing estimates
Listed below are the smoothing estimates. The intercept (proven in orange) stays fairly secure over time, however we do see a pattern within the slope (displayed in inexperienced).
ggplot(forecast_df, aes(x = month, y = smoothed_means_intercept)) +
geom_line(shade = "orange") +
geom_line(aes(y = smoothed_means_slope),
shade = "inexperienced") +
geom_ribbon(
aes(
ymin = smoothed_means_intercept - 2 * smoothed_sds_intercept,
ymax = smoothed_means_intercept + 2 * smoothed_sds_intercept
),
alpha = 0.3,
fill = "orange"
) +
geom_ribbon(
aes(
ymin = smoothed_means_slope - 2 * smoothed_sds_slope,
ymax = smoothed_means_slope + 2 * smoothed_sds_slope
),
alpha = 0.1,
fill = "inexperienced"
) +
coord_cartesian(xlim = c(forecast_df$month[1], forecast_df$month[length(ts) - n_forecast_steps])) +
theme(axis.title = element_blank())
Determine 3: Smoothing estimates from the Kálmán filter. Inexperienced: coefficient for dependence on extra market returns (slope), orange: vector of ones (intercept).
Filtering estimates
For comparability, listed here are the filtering estimates. Word that the y-axis extends additional up and down, so we will seize uncertainty higher:
ggplot(forecast_df, aes(x = month, y = filtered_means_intercept)) +
geom_line(shade = "orange") +
geom_line(aes(y = filtered_means_slope),
shade = "inexperienced") +
geom_ribbon(
aes(
ymin = filtered_means_intercept - 2 * filtered_sds_intercept,
ymax = filtered_means_intercept + 2 * filtered_sds_intercept
),
alpha = 0.3,
fill = "orange"
) +
geom_ribbon(
aes(
ymin = filtered_means_slope - 2 * filtered_sds_slope,
ymax = filtered_means_slope + 2 * filtered_sds_slope
),
alpha = 0.1,
fill = "inexperienced"
) +
coord_cartesian(ylim = c(-2, 2),
xlim = c(forecast_df$month[1], forecast_df$month[length(ts) - n_forecast_steps])) +
theme(axis.title = element_blank())
Determine 4: Filtering estimates from the Kálmán filter. Inexperienced: coefficient for dependence on extra market returns (slope), orange: vector of ones (intercept).
To date, we’ve seen a full instance of time-series becoming, forecasting, and smoothing/filtering, in an thrilling setting one doesn’t encounter too typically: dynamic linear regression. What we haven’t seen as but is the additivity characteristic of DLMs, and the way it permits us to decompose a time collection into its (theorized) constituents.
Let’s do that subsequent, in our second instance, anti-climactically making use of the iris of time collection, AirPassengers. Any guesses what elements the mannequin would possibly presuppose?

Determine 5: AirPassengers.
Composition instance: AirPassengers
Libraries loaded, we put together the information for tfprobability:
The mannequin is a sum – cf. sts_sum – of a linear pattern and a seasonal element:
linear_trend <- ts %>% sts_local_linear_trend()
month-to-month <- ts %>% sts_seasonal(num_seasons = 12)
mannequin <- ts %>% sts_sum(elements = checklist(month-to-month, linear_trend))Once more, we may use VI in addition to MCMC to coach the mannequin. Right here’s the VI method:
n_iterations <- 100
n_param_samples <- 50
n_forecast_samples <- 50
optimizer <- tf$compat$v1$prepare$AdamOptimizer(0.1)
fit_vi <-
perform(ts,
ts_train,
mannequin,
n_iterations,
n_param_samples,
n_forecast_steps,
n_forecast_samples) {
loss_and_dists <-
ts_train %>% sts_build_factored_variational_loss(mannequin = mannequin)
variational_loss <- loss_and_dists[[1]]
train_op <- optimizer$reduce(variational_loss)
with (tf$Session() %as% sess, {
sess$run(tf$compat$v1$global_variables_initializer())
for (step in 1:n_iterations) {
res <- sess$run(train_op)
loss <- sess$run(variational_loss)
if (step %% 1 == 0)
cat("Loss: ", as.numeric(loss), "n")
}
variational_distributions <- loss_and_dists[[2]]
posterior_samples <-
Map(
perform(d)
d %>% tfd_sample(n_param_samples),
variational_distributions %>% reticulate::py_to_r() %>% unname()
)
forecast_dists <-
ts_train %>% sts_forecast(mannequin, posterior_samples, n_forecast_steps)
fc_means <- forecast_dists %>% tfd_mean()
fc_sds <- forecast_dists %>% tfd_stddev()
c(posterior_samples,
fc_means,
fc_sds) %<-%
sess$run(checklist(posterior_samples,
fc_means,
fc_sds))
})
checklist(variational_distributions,
posterior_samples,
fc_means[, 1],
fc_sds[, 1])
}
c(param_distributions,
param_samples,
fc_means,
fc_sds) %<-% fit_vi(
ts,
ts_train,
mannequin,
n_iterations,
n_param_samples,
n_forecast_steps,
n_forecast_samples
)For brevity, we haven’t computed smoothed and/or filtered estimates for the general mannequin. On this instance, this being a sum mannequin, we need to present one thing else as an alternative: the best way it decomposes into elements.
However first, the forecasts:
forecast_df <- df %>%
add_column(pred_mean = c(rep(NA, size(ts_train)), fc_means)) %>%
add_column(pred_sd = c(rep(NA, size(ts_train)), fc_sds))
ggplot(forecast_df, aes(x = month, y = n)) +
geom_line(shade = "gray") +
geom_line(aes(y = pred_mean), shade = "cyan") +
geom_ribbon(
aes(ymin = pred_mean - 2 * pred_sd, ymax = pred_mean + 2 * pred_sd),
alpha = 0.2,
fill = "cyan"
) +
theme(axis.title = element_blank())
Determine 6: AirPassengers, 12-months-ahead forecast.
A name to sts_decompose_by_component yields the (centered) elements, a linear pattern and a seasonal issue:
component_dists <-
ts_train %>% sts_decompose_by_component(mannequin = mannequin, parameter_samples = param_samples)
seasonal_effect_means <- component_dists[[1]] %>% tfd_mean()
seasonal_effect_sds <- component_dists[[1]] %>% tfd_stddev()
linear_effect_means <- component_dists[[2]] %>% tfd_mean()
linear_effect_sds <- component_dists[[2]] %>% tfd_stddev()
with(tf$Session() %as% sess, {
c(
seasonal_effect_means,
seasonal_effect_sds,
linear_effect_means,
linear_effect_sds
) %<-% sess$run(
checklist(
seasonal_effect_means,
seasonal_effect_sds,
linear_effect_means,
linear_effect_sds
)
)
})
components_df <- forecast_df %>%
add_column(seasonal_effect_means = c(seasonal_effect_means, rep(NA, n_forecast_steps))) %>%
add_column(seasonal_effect_sds = c(seasonal_effect_sds, rep(NA, n_forecast_steps))) %>%
add_column(linear_effect_means = c(linear_effect_means, rep(NA, n_forecast_steps))) %>%
add_column(linear_effect_sds = c(linear_effect_sds, rep(NA, n_forecast_steps)))
ggplot(components_df, aes(x = month, y = n)) +
geom_line(aes(y = seasonal_effect_means), shade = "orange") +
geom_ribbon(
aes(
ymin = seasonal_effect_means - 2 * seasonal_effect_sds,
ymax = seasonal_effect_means + 2 * seasonal_effect_sds
),
alpha = 0.2,
fill = "orange"
) +
theme(axis.title = element_blank()) +
geom_line(aes(y = linear_effect_means), shade = "inexperienced") +
geom_ribbon(
aes(
ymin = linear_effect_means - 2 * linear_effect_sds,
ymax = linear_effect_means + 2 * linear_effect_sds
),
alpha = 0.2,
fill = "inexperienced"
) +
theme(axis.title = element_blank())
Determine 7: AirPassengers, decomposition right into a linear pattern and a seasonal element (each centered).
Wrapping up
We’ve seen how with DLMs, there’s a bunch of attention-grabbing stuff you are able to do – aside from acquiring forecasts, which most likely would be the final purpose in most purposes – : You’ll be able to examine the smoothed and the filtered estimates from the Kálmán filter, and you may decompose a mannequin into its posterior elements. A very engaging mannequin is dynamic linear regression, featured in our first instance, which permits us to acquire regression coefficients that fluctuate over time.
This submit confirmed tips on how to accomplish this with tfprobability. As of at this time, TensorFlow (and thus, TensorFlow Likelihood) is in a state of considerable inside modifications, with desirous to turn into the default execution mode very quickly. Concurrently, the superior TensorFlow Likelihood growth group are including new and thrilling options each day. Consequently, this submit is snapshot capturing tips on how to finest accomplish these objectives now: Should you’re studying this just a few months from now, chances are high that what’s work in progress now could have turn into a mature methodology by then, and there could also be quicker methods to achieve the identical objectives. On the fee TFP is evolving, we’re excited for the issues to return!
Berndt, R. 1991. The Follow of Econometrics. Addison-Wesley.
Murphy, Kevin. 2012. Machine Studying: A Probabilistic Perspective. MIT Press.
Petris, Giovanni, sonia Petrone, and Patrizia Campagnoli. 2009. Dynamic Linear Fashions with r. Springer.